





Продукция














Синхронный интеллектуальный групповой кран для 100-метровых рельсов
Для загрузки и разгрузки 100-метровых длинных рельсов на базе требуется шесть стационарных козловых кранов, осуществляющих совместное перемещение. При использовании ручного метода управления, ручного захвата и опускания рельсов, визуального позиционирования рельсов требуется согласованная работа шести или более человек.
Описание
маркер
Описание продукта
Для загрузки и разгрузки 100-метровых длинных рельсов на базе требуется шесть стационарных козловых кранов, осуществляющих совместное перемещение. При использовании ручного метода управления, ручного захвата и опускания рельсов, визуального позиционирования рельсов требуется согласованная работа шести или более человек. Кроме того, из-за человеческого фактора возникают различные погрешности, и в процессе подъема и транспортировки рельсы легко подвергаются скручиванию и деформации. Более того, персоналу необходимо постоянно подниматься и спускаться с транспортных составов, что создает угрозу безопасности. Для решения вышеуказанных проблем АО Чжучжоу Чанъюань Интеллектуальное Производство разработало новую синхронную интеллектуальную систему группового подъема 100-метровых длинных рельсов. Эта новая система управления обладает функциями синхронного действия, точного позиционирования и автоматического захвата/отпускания. Весь процесс загрузки-разгрузки может быть осуществлен одним оператором, реализуя все функции: запись местоположения штабелирования и хранения рельсов, автоматическое перемещение до позиции после ввода адресного номера, автоматическое зажатие и освобождение захватов, аварийную сигнализацию и защиту и т.д. В системе используются позиционирование с помощью кодовой шины Грея и сбор сигналов датчиков силы натяжения, передача управляющих сигналов по промышленной сети (полевой шине). Перемещение тележек осуществляется с частотным регулированием скорости, основная система управления использует ПЛК-систему для реализации системы автоматического синхронного управления, упрощения рабочего процесса. Один оператор может управлять несколькими или всеми электрическими талями для выполнения операций централизованного подъема и перемещения 100-метровых длинных рельсов, что повышает эффективность работы, снижает производственные затраты и обеспечивает безопасность строительно-монтажных работ.
Описание структуры централизованной системы управления
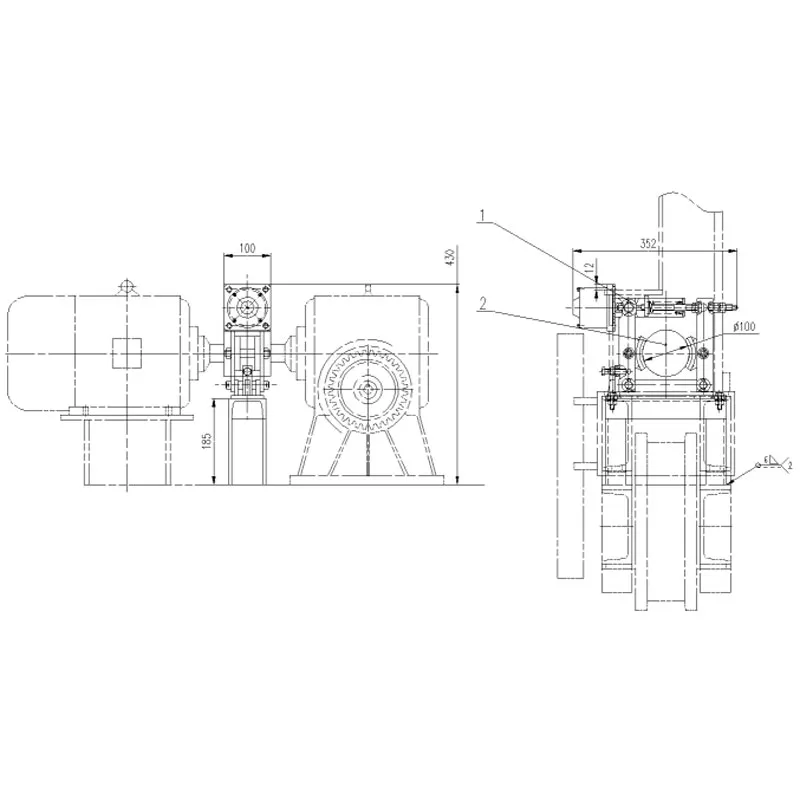
В данном проекте синхронная централизованная система управления перемещением группы кранов для длинных рельсов использует технологию управления на базе промышленной сети (полевой шины), образуя распределенную управляющую структуру, состоящую из центральной управляющей станции и локальных (полевых) управляющих станций. Центральная управляющая станция отвечает за единое управление всеми шестью локальными управляющими станциями и может реализовать функции индивидуального/группового управления шестью кранами. Локальные управляющие станции отвечают за исполнение команд для каждого крана. Центральная управляющая станция и локальные управляющие станции соединены посредством шины (сетевой связи).
В системе синхронное отслеживание положения кранов реализовано с помощью технологии позиционирования по кодовой шине Грея. Установленные на каждом кране кодовые шины Грея позволяют детектировать сигналы положения крана при перемещении в горизонтальном направлении. Положение каждого крана в реальном времени может передаваться от каждой локальной управляющей станции на центральную управляющую станцию. Центральная управляющая станция осуществляет единое диспетчерское управление и корректировку на основе положения каждого крана. Одновременно, привод горизонтального перемещения управляется частотными преобразователями. Центральная станция динамически регулирует выходную частоту каждого частотного преобразователя на основе текущего положения каждого крана, целевого адреса и эталонного положения кранов, обеспечивая синхронность их положения и точное управление остановкой кранов в целевом адресе. В процессе подъема кранами данная система использует датчики силы (тензодатчики) для сбора веса груза, поднимаемого каждым краном. Собранные сигналы передаются в локальные ПЛК-подсистемы по интерфейсу RS232C. Центральный пульт управления выполняет соответствующую логическую обработку на основе информации о весе, поступающей от локальных пультов управления, обеспечивая одновременную нагрузку каждого крана весом рельса и поддержание сбалансированной нагрузки между всеми кранами. При чрезмерной или недостаточной нагрузке на какой-либо кран его высота подъема может быть динамически отрегулирована, чтобы гарантировать нахождение всех кранов на одной высотной линии. Это, в свою очередь, обеспечивает безопасный подъем правильного рельса каждым краном. Одновременно информация о весе с каждого крана передается на главные станции управления, позволяя оператору в реальном времени наблюдать за состоянием захвата каждого крюка, избегая серьезных аварий, таких как захват не того крюка или срыв крюка в процессе подъема, и обеспечивая плавный и безопасный подъем.
связаться с нами
Сопутствующие популярные продукты

Подъемный кран для сбора рельсов типа SG25A
При работе крана для уборки рельсов модели SG25A возможна одновременная погрузка рельсов с обеих сторон, что значительно повышает эффективность работ по уборке. Кроме того, данное устройство может использоваться для погрузки и транспортировки крестовин, остряков, путевых машин, строительных конструкций и других длинномерных и тяжеловесных грузов.
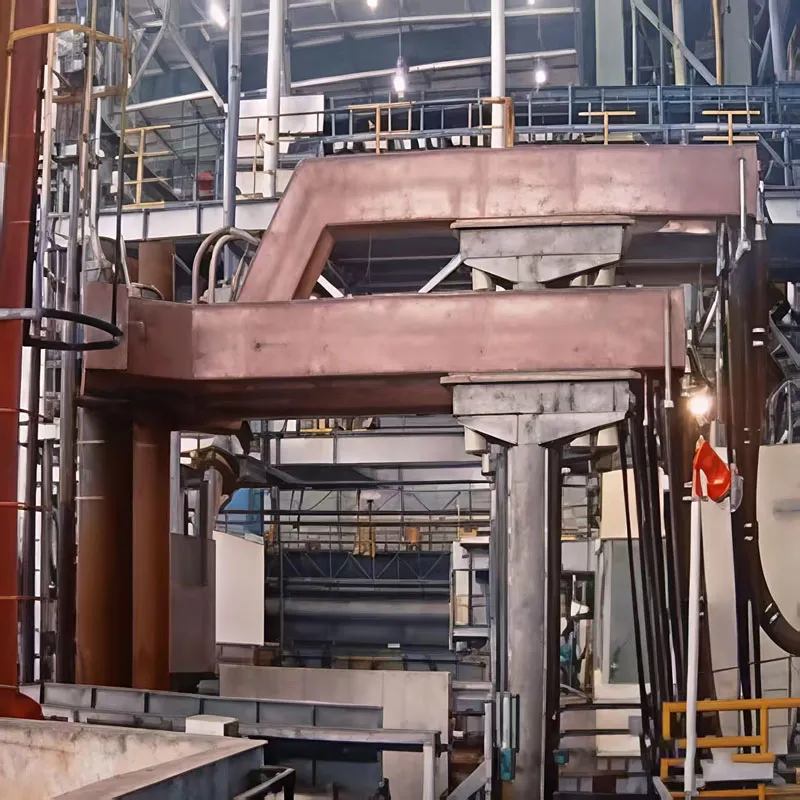
Руднотермическая печь
В основном используется для производства ферросплавов (таких как ферровольфрам, высокоуглеродистый ферромарганец, высокоуглеродистый ферросилиций и т.д.), а также технического кремния, карбида кальция, корунда, желтого фосфора и других продуктов.

Чугуновоз жидкого чугуна типа TS150
Предназначен для транспортировки жидкого чугуна по железнодорожным путям.

Сверхвысокотемпературная карбидизационная печь
Сверхвысокотемпературная карбидизационная печь является новой разработкой нашей компании, представляющей собой печь сверхвысокотемпературного типа. Она в основном предназначена для высокотемпературной обработки и очистки графитового порошка, а также подходит для карбидизации металлических порошков.

Двухстороннее шасси для односекционных строительных машин высокоскоростных железных дорог типа TR-110T
Транспортное средство в основном предназначено для прокладки кабелей на балластном основании безбалластного пути плитного типа CRTS III на высокоскоростных железных дорогах стандартной колеи.

Корундовая печь для очистки от оболочки
Корпус печи выполнен в виде двойной стенки с наружным охлаждением орошением водой и перемещается посредством тележки. Крышка печи представляет собой цилиндрическую крышку (с возможностью футеровки огнеупорным материалом изнутри). Сбоку одновременно предусмотрены два смотровых люка.

Испытательная машина с падающим грузом
Испытание на удар падающим грузом («копровые испытания») предназначено для проверки качества и эксплуатационных характеристик сварных стыков рельсов. Применяется для испытаний горячекатаных рельсов типов от 43 kg/m до 75 kg/m.

Дуговая электропечь для выплавки неметаллических материалов
Оборудование дуговой электропечи для выплавки неметаллических материалов в основном используется для плавки абразивных и огнеупорных материалов, таких как диоксид циркония, циркониевый корунд, электроплавленый корунд, муллит и т.д.

Система группового подъема 500-метровых длинных рельсов
Система группового подъема 500-метровых длинных рельсов типа MD2.8t-22m в основном состоит из опорных ног, поперечной балки, электрической тали грузоподъемностью 2.8 т и электротехнической части управления.

Тележка для перемещения балок
Тележка для перемещения балок является важным оборудованием для внутриплощадочного перемещения и транспортировки сборных железобетонных балок на полигоне (балочном дворе). В процессе реального строительства изготовление Т-образных балок осуществляется на заранее выбранном полигоне, расположенном недалеко от места монтажа.

Укладочная машина для длинных рельсов на основной и соседней путях для бесстыкового пути
Данный комплекс для укладки длинномерных рельсов (рельсовых плетей) на соседний путь является новейшей разработкой нашей компании. Он характеризуется высокой степенью автоматизации, высокой точностью укладки, отсутствием повреждений рельсовых скреплений балластного/безбалластного основания, высокой комплексной эффективностью работы, высокой надежностью и наличием независимых прав интеллектуальной собственности Китая.

Тигельная печь
В основном используется для плавки, выплавки или выдержки цветных металлов с низкой температурой плавления, таких как алюминий, свинец, олово, кадмий, баббиты и т.д.

Силовая платформа для работы на кривых малого радиуса
Специализированная платформа модели PC50 для интеллектуального завода по производству балок предназначена для эксплуатации на железнодорожных путях стандартной колеи 1435 mm. Управление может осуществляться как из кабины, так и с помощью пульта дистанционного управления.
LF-печь для внепечной обработки стали
Предназначена для замены плавильного агрегата (электропечи или конвертера) на стадии восстановительного периода, а также для проведения вторичной обработки выплавленной стали, включая поддержание температуры, нагрев, раскисление, десульфурацию, дегазацию, легирование, перемешивание продувкой аргоном.

Опускной вагон
Гидравлический самосвал-загрузчик для печей плавки сплавов является новейшей разработкой нашей компании. Он предназначен для транспортировки сыпучих грузов с высокой плотностью, таких как ферроникелевые чушки, лом нержавеющей стали и т.д.

Печь с соляной ванной
В основном используется для термической обработки металлических деталей, такой как закалка, отжиг, отпуск, нормализация и другие операции, проводимые в солевом растворе.